0729813477
0729813477
 s@konishi-kanagata.co.jp
s@konishi-kanagata.co.jp



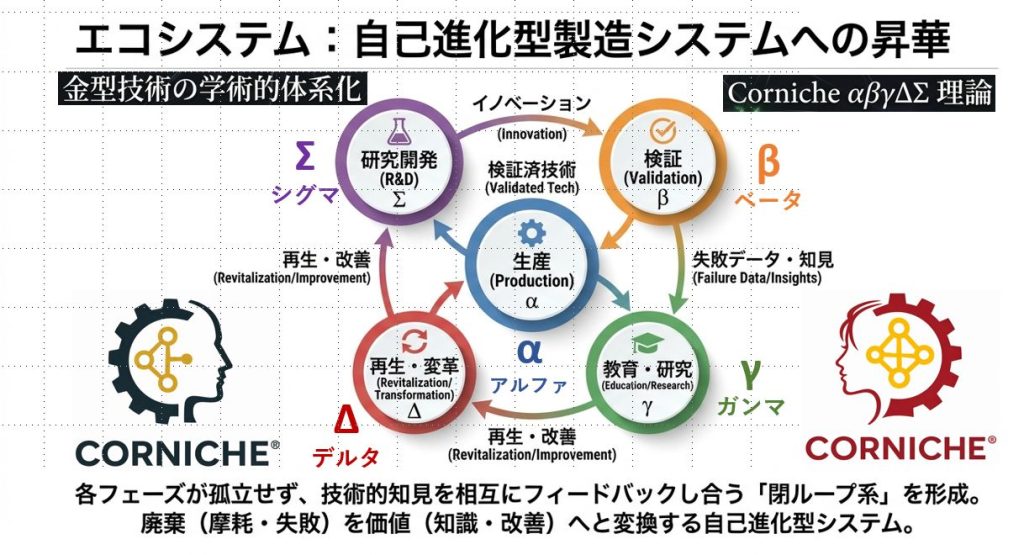
✨金✨型の価値はこれから爆上がりする🚀⚙️東大阪市場💎
― 量産(α)から革新(Σ)まで「統一エンジニアリング・ロジック」―
これから「金型」は“コスト”ではなく“資産”になる💎
製造業の競争軸が、すでに変わっています。
-
大量生産の効率だけで勝てない
-
多品種少量・短納期・特注が増える
-
人手不足で技能が継承しにくい
-
価格転嫁が難しく、差別化が必要
この環境で強くなるのは、再現性のある価値を生む仕組みを持つ会社。
その中心に来るのが――【金】型です。⚙️✨
なぜなら金型は、単なる工具ではなく
品質・生産性・育成・改造・革新を束ねる“価値創造のOS”
「金型の話が噛み合わない」問題を終わらせる:α/β/γ/Δ/Σという共通言語🗣️
α:量産の安定(Production Stability)🏭
同じものを、強く、速く、確実に。
-
品質・稼働率・寿命設計・保全まで含めた“量産の科学”
β:評価・試作(Validation / Prototype)🧪
失敗を安く、学びを速く。
-
条件出し・成立性検証・ばらつき設計=「立上げの工学」
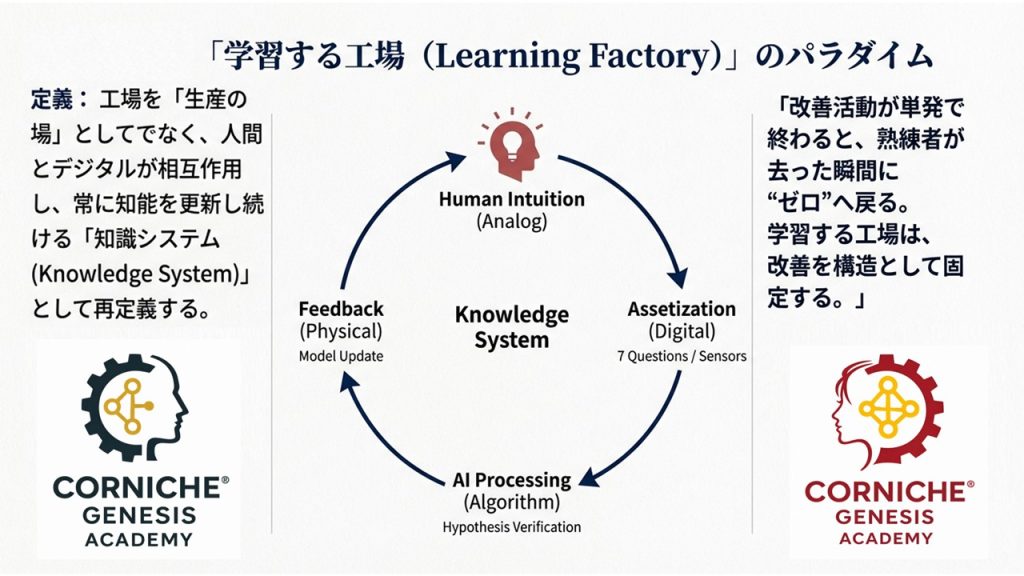
γ:教育・技能の形式知化(Learning / Training)🎓
強い現場を再生産する。
-
属人性を減らし、再現可能な技能へ落とす「教育の設計」
Δ:改造・再設計(Re-engineering / Retrofit)🛠️
過去の型を、次の利益構造へ。
-
延命ではなく“再価値化”。制約更新・改造設計・再要件定義
Σ:革新・統合(Innovation / System)🚀
個別最適を、全体最適に束ねる。
-
仕組み化・プラットフォーム化・ポートフォリオ化で伸ばす
なぜ「爆上がり」するのか?理由はシンプルに3つ📈
① 多品種少量×短納期で「β→α」が勝負になる⚡
“試作・評価で勝った会社が、量産も取る”時代。
βの設計ができる金型は、価値が高い。
② 人手不足で「γ(育成)」が製造のボトルネックになる👷♂️
技能が回らない会社は、設備があっても稼げない。
γを内蔵した金型体系は、組織の生産力そのもの。
③ 既存資産の再価値化=「Δ」が利益を作る💰
新作よりも、既存型を“勝ち型”に更新できる会社が強い。
Δは「守り」ではなく「攻めの投資回収」です。
工学的に一言で:価値は掛け算、損失は割り算📐
現場で使える超シンプル式👇
VCI = (Q × S × F) / R:(Value Creation Index:価値創造指数)
-
Q:Quality(品質)
-
S:Speed(立上げ/生産速度)
-
F:Flexibility(多品種少量への柔軟性)
-
R:Risk(不良・手戻り・属人化・停止)
Cornicheの強みは、
αβγΔΣを回すことで、Q/S/Fを同時に上げ、Rを先に下げる設計にあること。⭐
VCIは、「この金型(と運用)がどれだけ価値を生み、どれだけ損失を抑えられているか」を 1つの指標で見える化するための概念です。💡
画像中央のスター構造が示す“先勝パターン”⭐
直線工程じゃない。循環サイクルです。
-
βのデータ → αの安定を上げる
-
γの育成 → Δの改造品質を上げる
-
Δの再設計 → Σの革新テーマを生む
-
Σの戦略 → αの「何を量産すべきか」を決める
金型=価値創造の循環装置。
だから、価値は“爆上がり”します。🔥
これだけで議論が締まる🗣️稼ぐ金型✨
-
「今の話は α(量産安定) の最適化?」
-
「それとも β(成立性検証) の論点?」
-
「まず γ(育成/標準化) を先に設計する?」
-
「既存型は Δ(再設計) で更新できる?」
-
「最終的に Σ(仕組み化) まで引き上げる?」⚙️
#Corniche #金型 #プレス金型 #ものづくり #製造業 #生産技術 #量産 #試作 #立上げ #技能伝承 #人材育成 #改造設計 #リバースエンジニアリング #イノベーション #EngineeringLogic #Manufacturing #Kaizen #Quality #Productivity